Robots are steadily penetrating the packaging plant floor and will continue to do so in the future. That was the conclusion of the 2014 Trends in Robotics Market Assessment from PMMI, The Association for Packaging and Processing Technologies. According to the report, the use of robotics in primary packaging operations will more than double to 20% in 2018, up from 8% in 2013. The next largest increase for the technology’s use, it said, is in secondary packaging, where, on average, robots will work on 20% of secondary packaging lines in 2018, up from 10% in 2013. It added that robots performing palletizing tasks will account for 31% of the robots in use across manufacturers in 2018 on average, up from 21% in 2013.
In the following article, Part 2 of Packaging World’s Special Report on Robotics & Automation, three packagers demonstrate how they have implemented robotics in their plants in the areas of secondary packaging and palletizing to eliminate manual processes, improve worker safety, reduce costs, increase packaging line speeds, and improve package quality. See Part 1 of the report in our August 2015 issue at pwgo.to/1743.
Speed, operator safety top of mind for dairy plant
Laïta, a dairy cooperative located in northwest France, has built its reputation on the excellence of its products as well as on the quality of the relationships it has built with its 4,000 cooperative members and its 2,400 employees. Laïta’s renown has grown through such brands as its Paysan Breton spreading and whipped cream cheese products, Régilait milk, infant nutrition, and vending machine products, and Mamie Nova “luxury yogurt.”
Recently the dairy made a decision to install palletizing equipment that would not only increase the speed of production at its Créhen, Côtes-d’Armor, Brittany plant, but also relieve its operators of a highly repetitive and unergonomic manual task.
The Créhen plant is responsible for producing the Paysan Breton Madame Loik brand of whipped cream cheese. As the plant began producing increased volumes of product, it realized it needed to replace a manual palletizing process with an automatic system. It chose the Pal-Vite 410 robotic palletizing unit from Cermex, part of the Palletizing/Depalletizing Business Unit of Gebo Cermex.
For the Madame Loik range, paperboard tubs of cream cheese are hot filled and then cooled by going through a cold room. Historically, the tubs were transferred from the filler to the cooling unit by conveying them onto an accumulation table at the end of the line that could accommodate up to 50 tubs. The tubs were then moved by hand onto metal racks stacked on top of each other on trolleys that were then wheeled to the cooling unit.
To cope with growth in demand for its whipped cheese, Laïta had to increase its production rate. However, accelerating the manual transfer of tubs onto the racks was not an option, as a lack of space prevented Laïta from increasing the number of stations. The plant’s Health and Safety Committee also determined that increasing the speed of manual palletizing would be too repetitive and unergonomic for the operators on the line. Consequently automation emerged as the best solution for accelerating transfer to the cooling unit.
For the new system, Laïta had three main requirements:
• Frequent recipe and format changeovers—at least 20 per day—needed to be taken into account without automation increasing line downtime.
• The product accumulation capacity needed to be at least maintained, so as not to affect the upstream of the line, in particular by stopping the filler.
• The overall organization of production had to be complied with.
During the project, it became apparent to Laïta that it would make the most sense to automate its second filling line. This new approach would reduce the arduousness of the manual work on both lines, and it would be more cost-effective to invest in one unit with two product infeeds to manage both of the high-speed lines in the factory.
Now during packaging line operation, after package filling and sealing, the Pal-Vite 410 two-station robotic unit palletizes the cheese tubs layer by layer, with reusable cardboard separators inserted between layers. It manages the infeed of products on two lanes, coming from the filling machine of each line. The maximum speed is 15,000 tubs/hr. The robot can handle up to four different tub heights, with the possibility of handling two different heights simultaneously. The unit incorporates a magazine for plastic 800 x 1,200 Euro pallets and a layer-card magazine on wheels, which is part of a set of three layer-card magazines rotating between the palletizing unit, the post-cooling manual depalletizing zone, and the pre-shipment palletizing zone.
The unit ensures individual and contactless product handling and gripping in four stages that begin with an infeed system that spaces out the products with upper and lower belts. Next, a system of retractable fingers stops each tub to keep them spaced out. Via a servo-driven pusher, a row of products is positively transferred onto the layer preparation table, where a servomotor controls the step-by-step advancement of the layers.
The end-of-arm gripper tool is equipped with 96 suction cups that enable a whole layer to be palletized at one time. With four vacuum zones, gripping of the batch is secured if one product is dropped, and partial batch gripping of as little as one tub is possible in order to optimize runout phases during recipe or format changeovers. The choice of suction cup is adapted to guarantee optimum gripping without marking the tub lids.
For the Créhen system, Cermex combined both standard and custom components. While the robot and the pallet handling and stocking systems are standard, the gripper tools and the product collating system are custom. The unit has been divided into two zones—product handling and collation, and palletizing—in such a manner as to enable access and work without interrupting operation of the entire unit.
Says Laïta Project Manager Guillaume Demange, “Efficient project management by Cermex, with delivery, installation, and commissioning on schedule, gave us additional availabilities for starting up other internal investment projects. We had budgeted 40 man-hour days for startup and commissioning and for assisting staff, and only 50 percent of that budget was actually used.”
Since being installed, the Pal-Vite 410 robotic palletizing unit has not only met Laïta’s original speed and uptime requirements, with a 98% availability, but it also has provided new benefits. Among them, the Cermex solution was able to integrate automation of the second line within the project. Furthermore, compared with the previous manual solution, the product accumulation capacity has been tripled. The preparation table can accommodate up to one and a half layers, allowing sufficient accumulation to react to an incident on the palletizing station without stopping the filler upstream.
Says Gilles Meurou, head of Laïta’s Fresh Product Division, “We have managed to increase output very significantly as well as eliminate two zones where tasks were particularly repetitive and potential sources of musculoskeletal disorders. We are really satisfied with this solution, which is entirely in tune with our values focused on performance while protecting employees.”
Among the production and maintenance benefits realized with the Pal-Vite 410 are the following:
• Upgradability: for example, square tubs could be handled in the future.
• A user-friendly control panel that is quickly understood by operators and maintenance workers.
• Assistance with locating faults and handling restarts.
• The unit is simple and easy to maintain: The robot tilts and orients its tooling vertically for cleaning and easy replacement of the suction cups.
• Integration into the line: Signals are exchanged with the upstream equipment so as to avoid product accumulation if the line is stopped.
• The possibility for Cermex to intervene remotely.
As for the quality of the tubs, their structural integrity is maintained by pressureless handling, and the absence of jamming preserves their iconic shape. In addition, the soft cheese is kept level as the tubs advance smoothly throughout the process, improving the visual appearance of the contents after cooling.
Video available online at pwgo.to/1706.
Mobile, PLC-controlled robotic case packer handles two lines
Like many packaging companies investigating automation for their plants, manufacturer Berry Plastics’ the motivation for was to eliminate a manual process on its packaging lines and reduce costs. With the installation of a new top-load case packer equipped with a Yaskawa Motoman HP20-D robot in late 2014, Berry was not only able to achieve these goals, but also found a solution that eliminated the need for highly trained operators to program the robot through the unit’s use of a Unified Controls Architecture.
Berry Plastics is a manufacturer of plastic packaging for food and beverage applications as well as protective film for a range of industries. Before installing the HP20-D at its PET manufacturing plant in Dunkirk, NY, Berry used a manual process to load PET containers into reshippers, using two to three operators on two 100-part/min packaging lines.
In switching to an automated process, Berry had several requirements for the equipment. Among them, the flexibility to move the system between lines. “We wanted to be able to move the robot to various manufacturing lines and tie into them, depending on our schedule,” explains Dan Giusti, Automation Engineering Manager at Berry. “Initially, we weren’t able to justify a robot for just one line, in terms of run hours.”
With this in mind, space was a constraint for any automation solution. “We had a little bit of flexibility,” says Giusti, “but it was really about keeping this unit in the correct size so we could move it around, keep it mobile.”
Working with its systems integrator, AIS Container Handling, Berry chose the HP20-D for its six-axis movement capability, distance of reach, and 20-kg load weight, which could accommodate the necessary tooling. From there, AIS designed the robotic case-packing equipment for mobility.
“It was uncharted territory,” explains AIS VP of Sales and Marketing Dan Caverly. “The challenge was designing a unit robust enough to provide years of reliable service while being light enough to allow for modular portability. This was an engineering-intensive undertaking. We knew we had to make it strong enough so that the mechanical parameters wouldn’t be disrupted when changing over to a new line. Another challenge was making the unit flexible enough to accommodate various bottles, cases, and production lines, all the while minimizing the changeover complexity once it was located.”
The resulting system is designed to be moved via forklift between two lines, with wheels on the bottom that help operators with final positioning. The robot is used to pick empty, upright PET jars from a conveyor using a vacuum end effector, flipping them to an inverted position using a bottle rotator, and placing them into a case. The system can handle a number of different bottle and case sizes.
One of the most unique aspects to the project, however, is the robot’s control system—or lack thereof. As Caverly explains, whereas most robots use both a PLC and a specialized robot language that is different than the one used by the rest of the plant, the HP20-D uses the Yaskawa MLX200 Robot Gateway, which allows all programming to be done through the PLC. “Now we have the ability for these two components to communicate in the same language, allowing anybody familiar with PLC programming to make revisions, updates, improvements, etc.,” he says. “The robot essentially holds the Teach Points, and the PLC controls everything else. It is much easier to program the whole system because there is only one program.” Berry’s Dunkirk facility uses Rockwell Automation’s RSLogix 5000 software language.
With the new robotic case packer installed at Berry, the automated process is as follows:
• Bottles enter the cell on a tabletop conveyor
• Empty cases enter on a roller conveyor
• Bottles end at an adjustable stop location
• Cases are stopped with a retractable stop blade
• Cases are tilted toward the robot to utilize some gravity while loading
• Bottle rotator uses suction to position a row of bottles on their side, with the bottoms facing the robot
• Robot uses vacuum suction cups to secure the bottom of each bottle
• Bottles are loaded, row by row, two cases at a time
• Wide-mouth bottles (when applicable) are loaded one case at a time
• Cases are tilted back to their original position
• Powered roller conveyor transfers the packed cases out of the unit
Says Giusti of the system, “We haven’t had any issue. It was a really good install—very few roadblocks. We are really happy with it.”
Collaborative robot makes a believer out of skeptical co-packer
Grand Rapids, MI-based co-packer Praxis Packaging had no intention of buying a robot. Offering a huge array of packaging capabilities and serving a number of diverse industries—including OTC, pharmaceutical, club store, and retail—Praxis believed robots could never provide the flexibility they required.
“We have many line changeovers in a typical shift—as many as 30 in eight hours,” says Praxis President Richard King. “Having a dedicated robot to perform any single function was not practical. Any particular job might never run again.
“I perceived robots as high-precision, very task-specific machines that required a programmer for even the simplest changes. The worker safety barriers and guarding required a specific location on the plant floor for traditional robots to be permanently allocated for just their use.”
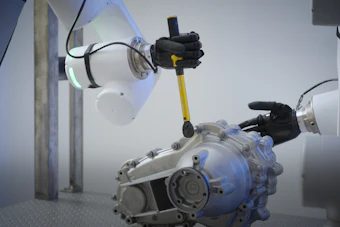
But a segment on CBS news program “60 Minutes” started a chain of events leading to the installation at Praxis of one robot, followed by two more. “Our future changed in an instant,” says King. The subject of the “60 Minutes” spot was Baxter, a collaborative robot featuring advanced Artificial Intelligence (AI) from Rethink Robotics.
Featuring a decidedly human demeanor, Baxter uses compliant motion control to operate safely, precisely, and adaptively. Rethink’s Intera software platform enables Baxter to be programmed by operator demonstration, rather than through traditional programming, allowing non-technical, in-house staff to program the robot quickly and easily. Providing an alternative to fixed-position robots for high-mix environments, Baxter’s Robot Positioning System and manual, intuitive user interface allows it to be easily modified, moved, and redeployed. And, in terms of safety cages, Baxter does not need one. Instead, it is embedded with sensors throughout its joints as well as series elastic actuators and back-drivable motors to work safely alongside operators.
Scott Hanmer, Senior Vice President at Praxis, was the first to see Baxter on “60 Minutes” and recommended it to King. “He made me watch Baxter on YouTube for over an hour,” King recalls. “I still needed convincing.” After a hands-on demonstration at a local company, however, King says he was convinced that the solution could work for Praxis to eliminate repetitive manual tasks on a number of its lines—for example, the removal of blisters from a blister-packing line.
“What we needed was a machine that could be easily programmed to perform simple, repeatable tasks for a couple of hours at a time before being quickly moved to another task,” King says. “When we saw how quickly Baxter could be programmed and changed over, we knew we had a solution.”
Baxter was installed at the Grand Rapids plant in September 2014 by a team from Rethink that unpacked and assembled the robot. According to King, within one day, the operators at Praxis were experts. He adds that while the YouTube videos were helpful, it wasn’t until he grabbed Baxter’s wrist and programmed him for a pick-and-place application in just two minutes that he realized how ingenious the interface is. “The ‘easily programmed’ requirement was met,” he says. “He was adding value right away.”
One area in which Praxis struggled at the beginning was slow setups between jobs. Maintenance and Setup teams were spending a lot of time tweaking the layouts to get everything aligned. But not long after installing Baxter, Praxis became a Beta site for Rethink’s Robot Positioning System technology, featuring position markers called Landmarks. Landmarks are simple barcode-like locators placed on fixtures that Baxter’s embedded vision and other sensors use to recognize the layouts of the work cell. If a table or conveyor is accidentally moved, Baxter can quickly recover and adapt to the new locations.
“It was not until we experimented with them that we realized the real opportunity for Praxis,” says King. “If we attached Landmarks to our fixtures and treated it like a tooling change on setup, we could shorten our changeover times to a fraction of what they were. The fixtures and conveyors could now be rolled in, and Baxter could reliably be retrained in a matter of minutes. It also allows multiple robots to be added to the production line without the need to reprogram each one.”
To accommodate various applications, Baxter uses a range of end-effector suction cups or grippers, which King says are “the single most critical piece of the puzzle,” noting, “if you can’t pick it up, you can’t place it.” For the majority of Praxis’ applications, the end effectors from Rethink do the job. For more complex operations, Praxis has purchased a 3D printer, which it uses for rapid prototyping of their own end effectors. “Each application requires a bit of ‘McGyver-esque’ intuition,” says King. “Once we have identified the proper end effector, we send it out to be fabricated.”
Currently, Baxter is running on multiple lines with multiple applications. Since the first robot was purchased, Praxis acquired two more units and has created a Baxter Lab for testing fixtures and programs. “We focus on developing tasks that are simple in nature, but highly repetitive,” says King. “Although we change over quickly, the return on investment is quickly made up on longer-run jobs.”
Video available online at pwgo.to/1707.